Not just any material
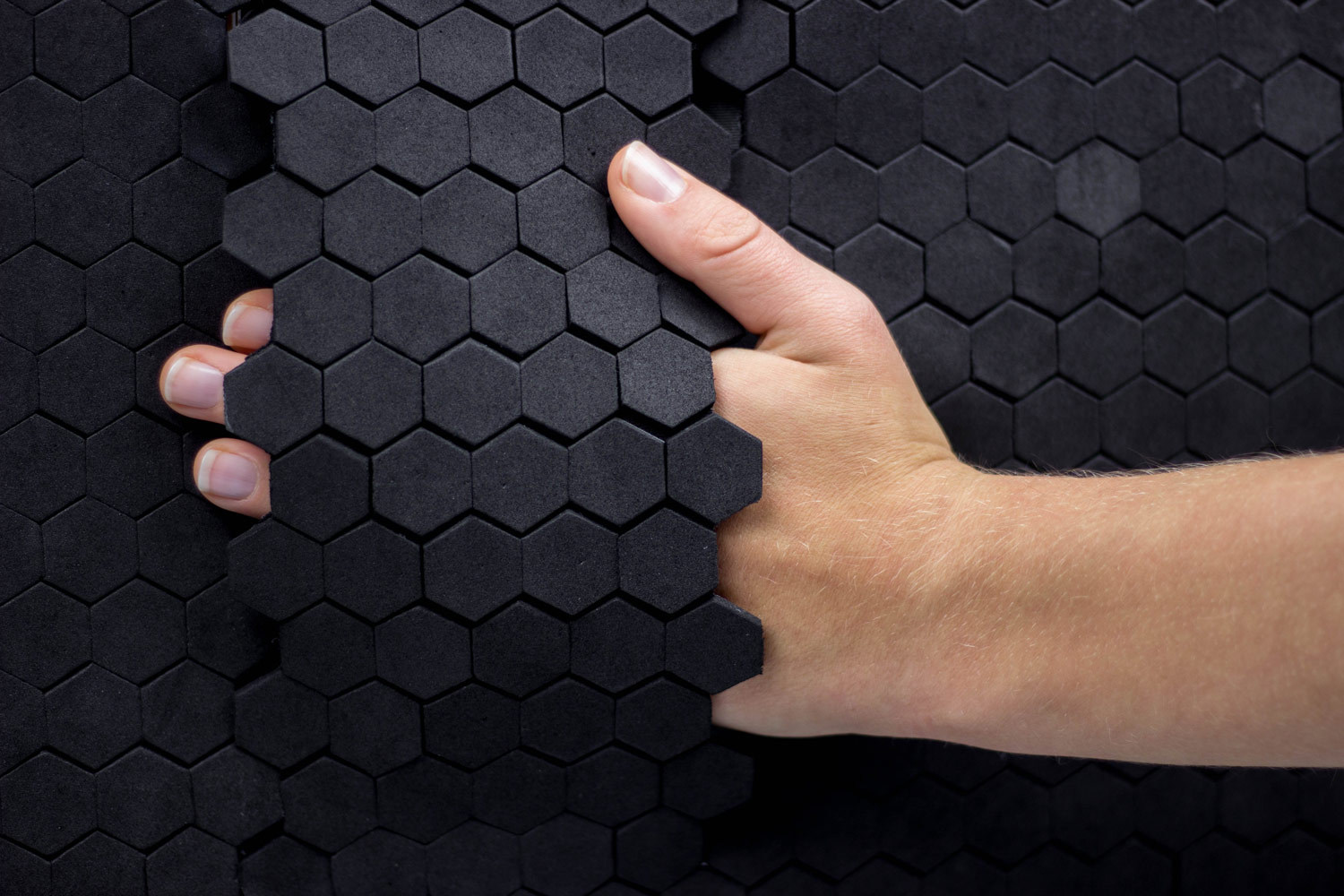
What Tex 120° lacks as a concept it compensates in its interactive capabilities. The material has flex sensors embedded into its base that allows it to detect user input through pressure and user displacement. In combination with two actuators an interactive feedback loop is established. This lets the material function as both a tactile display, whilst being an interface that detects user input. The hexagons at the surface of the material provide the stretch and rigidness needed for the expressive kinesthetic displacement of the material. The result is an intuitive to use and life-like material. The applications for such a material could vary from a car-door handle that appears when you need it, to a smart smart wallet that gives you the exact card or change you need at a given moment.
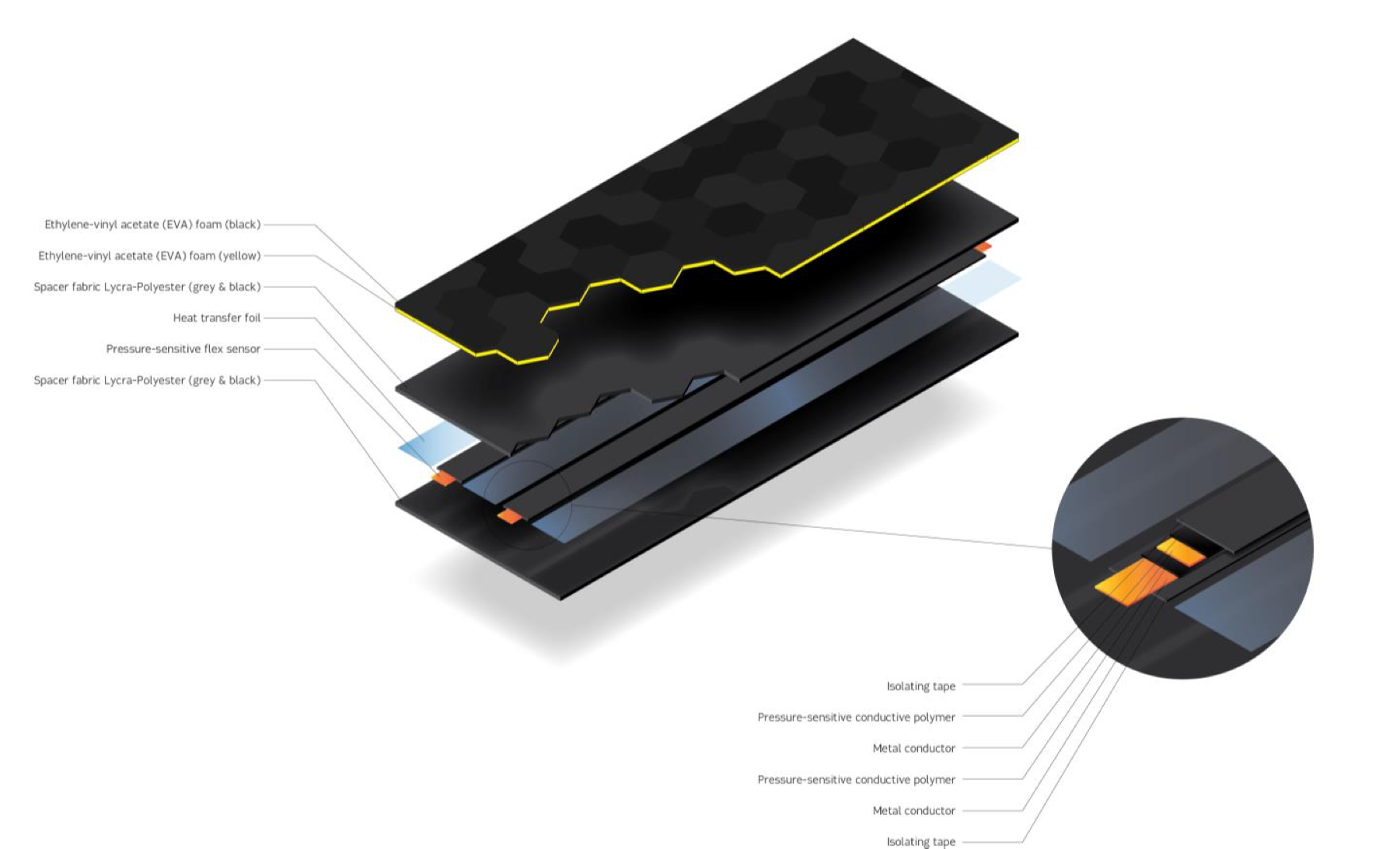
To create Tex 120° it took the team many material iterations to get to this result. By testing numerous samples mounted on an actuated rig, we explored new kinesthetic motions and potential interactions with diverse material properties. The end prototype’s hardware consists of an Arduino, Processing, Dynamixel actuators, and custom-made flex sensors. A laser cutter was used for cutting out the hexagon pattern in foam, a heat press glued the layers that hold the flex sensors in place.